

将您的Autodesk Revit BIM模型连接到NavVis现实捕捉技术,以实现更高效的桌面端竣工验证工作流程。
即使他们拥有使用BIM 模型和点云的高级知识,更新现有建筑的BIM 模型也是一项耗时的任务,无论是需要亲自到现场进行测量和拍照,还是使用可能无法提供现场访问所能提供的详细程度的点云。
如果从头开始创建一个现有建筑的BIM 模型,建筑现状文档 通常会过时且支离破碎。BIM 建模者将花费大量精力,精心拼凑数据,以创建一个具有凝聚力的BIM 模型,即便如此,模型也不一定可靠。
NavVis 提供了捕捉和可视化建筑环境的一体化解决方案。
借助NavVis Autodesk Revit插件,用户现在可以通过将 Revit 模型与展示建筑当前状态的 360° 沉浸式影像及点云数据相连接,从而优化BIM 。
什么是适用于Autodesk Revit 的NavVis 插件?
NavVis Autodesk Revit 插件Autodesk Revit 现有建筑BIM 创建和更新工作流程。
该插件可将BIM 模型连接到NavVis IndoorViewer 3D 可视化软件,该软件可在浏览器中将 3D 扫描显示为全景图像和点云。
通过该插件,您可以直接在Autodesk Revit 内并排查看BIM 相应的NavVis 实例。
它可与NavVis 室内系统采集的数据或静态扫描仪采集的数据一起使用。 移动扫描 系统采集的数据(该系统可同时采集高密度全景图像和点云)或静态扫描仪采集的数据。
当使用静态扫描仪时,NavVis IndoorViewer 会自动将结构化 e57 点云文件转换为 360° 沉浸式漫游。
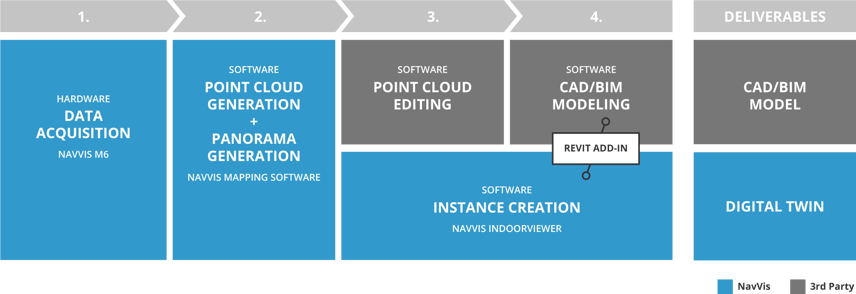
这张图展示了NavVis 技术可以优化扫描到BIM 工作流程并用于生成新的可交付成果,例如数字孪生。
如何利用它?
用户需要一个正常运行的NavVis IndoorViewer 实例才能使用该插件。有关如何获取NavVis IndoorViewer 实例的详细信息,请访问此处。
该插件可将建筑物的扫描状态显示为 360° 的沉浸式图像,并通过点云加以丰富。用户可以并排查看 "建成 "与 "现状 "的对比,从而准确、高效地更新现有建筑物的BIM 模型。
用户只需点击BIM 模型中需要更新的位置,即可在插件中找到自己的位置。这样就省去了翻阅文件和现有条件照片的繁琐工作。
实际上,用户无需离开办公桌,就可以直接将BIM 建好的模型与现场的实际情况进行比较,从而更快、更简便地进行验证。
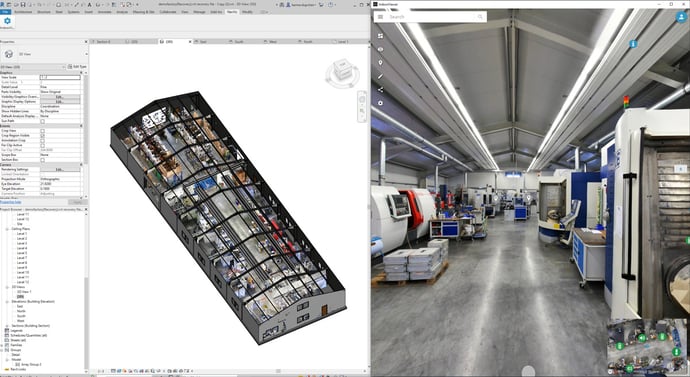
查看 autodesk revit 中的 BIM 模型与 NavVis IndoorViewer 提供的沉浸式全景图像的并排比较。
主要优点和优势
-
比较 "竣工 "与 "现状":逼真的 360° 沉浸式图像为用户提供了一个真实世界的比较工具,使他们能够快速、轻松地发现差异。NavVis IndoorViewer 中高度详细的全景图像描述了现实情况,使用户能够放心地工作。
-
远程验证测量结果:基于网络的三维可视化增强了高密度点云,使用户能够直接从桌面上对现有条件进行精确的点对点测量。这一功能使建模、更新和验证测量成为可能,而无需离开舒适的办公室。
-
在线共享和发布变更:NavVis IndoorViewer 的 Autodesk Revit 插件通过允许用户在线与所有相关方共享更新或重要信息,显著提升了点云扫描(scan-to-BIM)项目协作效率。此过程就像通过电子邮件分享链接一样简单。
总结
借助 NavVis IndoorViewer 的 Autodesk Revit 插件,用户可以享受到 NavVis IndoorViewer 带来的附加价值,例如添加带有地理标记的可搜索信息、进行测量、虚拟路径规划,甚至在浏览器中裁剪和下载点云。
用户将不再需要应对过时的文档、繁琐的验证以及与建筑利益相关者之间碎片化协作所带来的不便。NavVis IndoorViewer 的 autodesk revit 插件还可以作为一项附加交付成果,供激光扫描专业人员提供给他们的点云扫描(scan-to-BIM)客户。
您准备好试用NavVis IndoorViewer了吗? |
|
创建自己的试用实例 |
试用我们的演示实例 |
|
|
|
|
通过NavVis IndoorViewer 实例和为期 15 天的免费试用 NavVis Cloud 账户,创建您自己的 3D 建筑。 |
通过浏览我们的演示实例,在浏览器中体验我们基于网络的完全沉浸式 3D 建筑软件。 |
 |
 |
