

三维激光扫描可以捕捉到大量宝贵的真实世界数据,这些数据具有惊人的潜力,不仅可以将物体数字化,还可以将整个环境数字化。唯一的问题是,激光扫描仪捕捉到的数据通常只有懂得使用点云的专业人士才能使用,而且这些专业人士在使用将这些点云转化为平面图和BIM 模型的软件方面接受过培训。
NavVis IndoorViewer 是一款旨在让更多人了解激光扫描仪采集的 3D 数据的软件。有了NavVis IndoorViewer,点云就可以通过一个直观的网络应用程序变成逼真的、身临其境的体验。
该软件最初是为可视化NavVis M6 室内移动扫描 系统采集的数据而开发的,但在用户的强烈要求下,现在已完全支持来自静态激光扫描仪的点云文件。完全支持意味着可以将点云数据集上传到NavVis IndoorViewer,软件会自动将其转换为逼真的交互式 3D 演练。请继续阅读,了解如何将NavVis IndoorViewer 与静态激光扫描仪结合使用。
NavVis IndoorViewer 完全支持 e57 点云文件
NavVis IndoorViewer 软件以单个 URL 实例的形式提供,单个NavVis IndoorViewer 实例支持上传多个扫描数据集和来自不同设备的扫描数据。这些数据集在单个实例中进行组合,并转换成从建筑物到整个校园的虚拟表示。点云可以 .ptx、.ply、.pts、.xyz 和 .e57 点云格式上传。
由于 e57 点云是使用最广泛的格式之一,我们为NavVis IndoorViewer 开发了一项功能,用于从静态激光扫描仪采集的 e57 点云中提取或重建全景图。当您导入 e57 格式的点云时,该功能会根据点云数据和扫描仪拍摄的图像(如果有)渲染完全身临其境的 360° 全景。要使用该功能,点云必须包含结构化的、理想的彩色 (RGB) 信息。如果 e57 点云不包含颜色(RGB)信息,而且仅基于强度值,则仍可呈现黑白 360° 全景。
如何将 e57 文件导入NavVis IndoorViewer
1.进入NavVis IndoorViewer 设置 -> 数据集管理,找到 "导入点云 "标题。
.jpg?width=720&name=1_How-to-import%20(3).jpg)
2.点击 "上传点云",打开文件浏览器。
.jpg?width=690&name=2_How-to-import%20(1).jpg)
3.选择要导入的点云文件并点击 "打开"。请记住,导入程序支持以下点云格式:.ptx、.ply、.pts、.xyz 和 .e57。
.jpg?width=690&name=3_How-to-import%20(1).jpg)
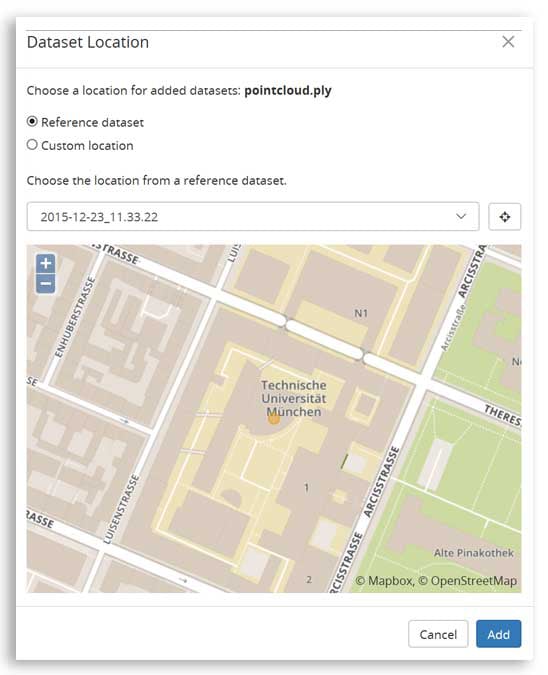
4.选择数据集位置,等待导入程序上传和处理文件。
在NavVis IndoorViewer 中上传 e57 文件的好处
NavVis IndoorViewer 可自动将 e57 点云文件转换为交互式、逼真的 360° 透视图,您将获得宝贵的交付成果,并可通过发送链接轻松共享。 这一功能对于从事复杂项目的利益相关者尤为重要,NavVis IndoorViewer 可远程访问现场,并可用作协作和信息交流的平台。用户无需下载或安装专门的软件,就可以像在现场一样在实例中移动。请看下面的示例,了解 e57 点云如何在NavVis IndoorViewer 中使用:
下面是上传到NavVis IndoorViewer 时发生的情况:

之前:e57 点云文件,由静态激光扫描仪采集

之后:在NavVis IndoorViewer 中将 e57 点云文件自动转换为身临其境的 360° 透视图
访问NavVis IndoorViewer 的全部功能:
-
提供扫描地点的高分辨率 360° 全景图像。
-
添加兴趣点 (互动图标,可包含文本、音频、视频甚至整个网页)。
-
测量任意两点之间的距离。
-
通过双击浏览点云。
欲了解更多信息,请访问 NavVis IndoorViewer 网站.
