SLAM 和移动扫描之权威指南
SLAM 的技术演变
由于自 20 世纪 80 年代以来计算能力的飞速发展,更不用说像谷歌这样的公司可以免费下载代码,SLAM 现在已经被广泛应用于各种领域。事实上,在几乎所有需要实时三维地图的机器运行应用中,你都能看到它的身影。这项技术的发展帮助我们了解了如何在不同的平台和环境中实施SLAM ,从而增强了移动扫描 系统的功能。
以下是一些依赖 SLAM 技术的应用程序:
- 自主消费机器人技术(如无人机或扫地机器人)
- 自动驾驶汽车
- 智能手机增强现实应用
- 3D移动扫描 系统
这些日常产品利用同步定位和制图技术实现精确的实时导航。


移动扫描 vs 架站式扫描仪
对比它们的工作流程以及它们如何满足您的项目要求
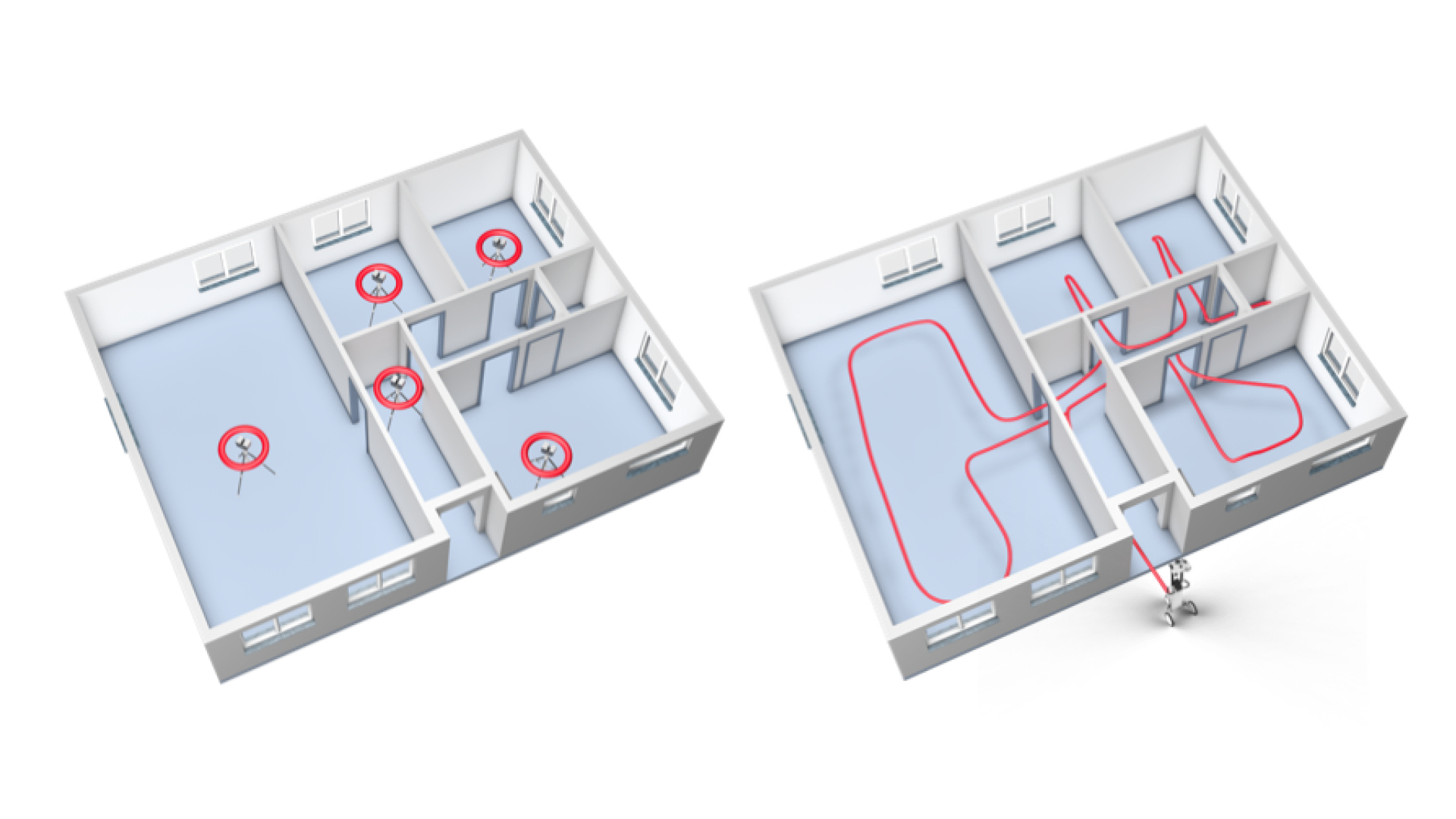
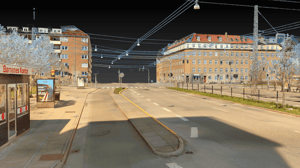
为了说明 SLAM 和移动扫描系统的优势,让我们看一下它在扫描普通办公环境时与架站仪相比之下的性能。
右图是使用 TLS 和基于目标的套准捕捉这一复杂空间所需的设置示意图。在每个门框中增加额外的设置,以便点云对准 注册(除非您想花时间设置目标)。如果有家具遮挡扫描仪的视线,则需要增加额外的设置;如果要捕捉窗框等特征的细节,则需要增加更多的设置。
用架站仪最快可以在20分钟内扫描该空间,但是鉴于上面列出的其他因素,它可能要花费更多时间。
使用移动扫描 工作流程,您可以放弃使用三脚架,只需根据需要在空间中穿行即可进行拍摄。您可以快速移动,确保拍摄到所需的一切,让同步本地化和制图技术为您绘制周围环境。



在线体验
在移动扫描革命中向前更进一步
移动扫描 设备的速度和可扩展性是有史以来最好的,可为最具挑战性的项目带来测绘级别 精确度。亲身体验NavVis VLX ,您就会发现一切皆有可能。该工具体现了移动扫描 以及同步定位和制图的最新技术,即使是最具挑战性的项目,也能提供无与伦比的准确性和效率。