

让我们一起来探索SLAM 技术,包括它的基本功能和工作原理,以及确保获得顶级移动扫描 效果的实际技巧。
移动系统的优势在测绘行业众所周知。与地面激光扫描仪(TLS)相比,这些工具能提供更快的工作流程和更好的覆盖范围,这对服务提供商来说意味着减少现场时间和降低采集成本。
然而,对于经验丰富的三维专业人士来说,移动扫描 系统似乎是一种冒险的方式,无法生成他们业务所依赖的数据。这是因为移动扫描 系统依赖于同步定位和绘图 (SLAM) 算法,该算法将大量绘图工作流程自动化。这种自动化可能会让人难以准确理解移动扫描 系统是如何生成最终点云的,或者现场技术人员应如何规划其工作流程以确保交付最高质量的成果。
为了提供帮助,本文将打开黑盒子,更详细地探讨SLAM 。我们将介绍该技术的基本原理,它如何影响最终点云的准确性,最后,我们还将提供一些实用技巧,以确保您能获得值得信赖的结果。
SLAM 究竟是什么?
同步定位和绘图 (SLAM) 是一种算法,可融合绘图系统的机载传感器(激光雷达、RGB 摄像头、IMU 等)的数据。- 以确定您在资产中移动的轨迹。
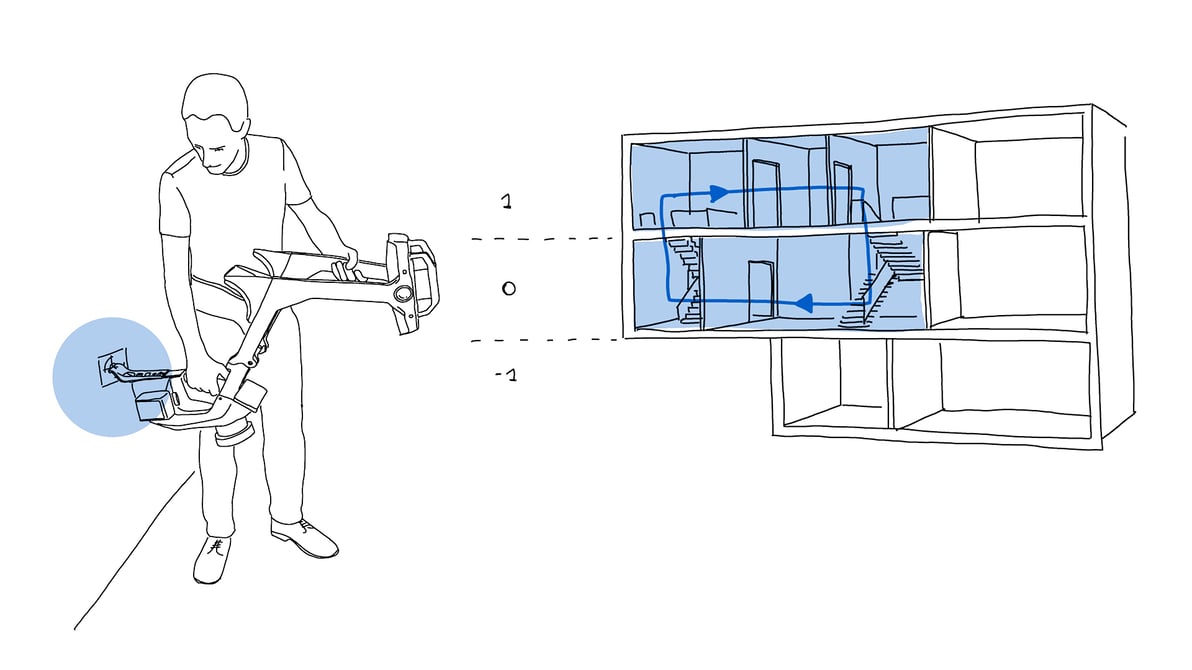
下面是对其工作原理的简化解释:当您初始化系统时,SLAM 算法会使用传感器数据和计算机视觉技术来观察周围环境,并对您当前的位置做出精确的估计。
当您移动时,SLAM 会根据您之前的位置估计值,从系统的车载传感器收集新数据,将这些数据与之前的观测数据进行比较,然后重新计算您的位置。
将此过程不断重复,SLAM 系统将最终跟踪您在建筑物中所行驶的路径。
SLAM 这是一个复杂的过程--即使在上面的简化解释中也是如此--但你可以把它想象成类似于测量中的横测法。在横断法中,测量师 ,沿着行进路线对若干个点进行测量。当测量师 移动测量每一个新点时,他们会使用之前的点作为计算基础。
SLAM 算法每秒都会进行大量这种精确计算。换句话说,SLAM 算法是一种在移动过程中自动执行遍历的复杂技术。
.png?width=1920&name=MicrosoftTeams-image%20(9).png)
SLAM 对扫描精度的影响
要了解SLAM 设备的准确性,您需要了解地图系统获取数据方式的关键区别。
架站仪 (TLS)通过 360° 旋转激光传感器并对周围环境进行测量来捕捉环境。由于它是从一个固定位置发射的,因此它捕捉到的点云中的每个测量点都已经在空间中相对于扫描仪进行了精确对齐。
移动扫描 系统也能 360° 旋转激光传感器,但不是从固定位置旋转。由于扫描时需要行走,因此传感器在旋转时也在移动。这会导致每次测量的对准误差,并降低最终点云的精度。
如果您在夜间拍摄照片时移动了相机,就会出现类似的模糊现象。同样,如果您查看来自移动扫描 系统的原始数据,然后再通过SLAM 算法对其进行清理,您会发现这些点看起来很乱,而且在空间上分散并加倍。
移动扫描 系统旨在纠正这些对齐误差,生成干净、准确的点云。为此,它使用SLAM 算法记录的轨迹。这些数据使其能够确定扫描仪在每次测量时的位置,并在空间中准确地对齐这些点。
这意味着SLAM 驱动的移动扫描 系统的精度不仅取决于传感器本身的精度。它在很大程度上还取决于SLAM 算法跟踪轨迹的能力。
SLAM 精度误差
要开发能准确跟踪轨迹并生成高质量点云的SLAM 算法,制造商面临着纠正两种主要误差的巨大挑战。
第一种称为 跟踪误差.跟踪错误之所以会发生,是因为SLAM 算法在某些环境下会出现问题。例如,长长的走廊通常缺乏SLAM 所依赖的环境特征,这可能导致系统无法追踪到你的位置。

第二种误差称为 漂移漂移 ,因为SLAM 算法使用传感器数据来计算您的位置,而所有传感器都会产生测量误差。由于SLAM 算法的工作方式是根据之前的位置计算每个位置,就像横移一样,因此传感器误差会在扫描过程中累积。这会导致轨迹精度 "漂移",并降低最终结果的质量。
如果您使用早期的移动扫描 系统进行扫描,这些错误很可能会影响最终数据的质量。
从工作流程中确保高质量结果
好消息是,移动扫描 技术自投放市场以来已日趋成熟。制造商已经开发出成熟的SLAM 算法,可以自动减少跟踪误差和漂移 。而移动测绘人员现在也提供了可靠的手动纠错流程,因此您可以最大限度地提高最终点云的精确度。
最常用的纠错程序称为 闭环扫描.要执行闭环扫描 ,只需返回到已经扫描过的点,SLAM 就会识别重叠的点。这就为它提供了计算漂移 或跟踪错误所需的全部信息,并进行必要的修正。您可以将闭环扫描 视为自动关闭横断面的过程。
虽然闭环扫描 在体育馆、室外区域甚至大型办公室等大空间都很有效,但有些环境会让闭环扫描 变得困难重重(如上文探讨的长走廊)。
在这种情况下,更先进的移动扫描 系统提供了将扫描数据锁定到控制点的功能。这个过程也很简单:在要采集的资产上放置测量控制点,如棋盘目标。然后,使用精度高于移动扫描 系统的系统(如全站仪)采集它们的坐标。
在扫描资产时,捕捉控制点。移动扫描 系统会利用这些信息将移动点云捕捉到位,减少误差,即使在最具挑战性的环境中也能保证测绘级别 的精度。当精确度至关重要时,就需要使用这种方法。
SLAM 算法至关重要
在此,有必要指出的是,每个制造商都在其系统中使用专有的SLAM 算法。 移动扫描系统。这些算法表面上看似相似,但它们之间的差异可能意味着最终数据质量的巨大差距。
因此,在购买过程中研究移动扫描 系统,了解SLAM 的正确细节,是确保高质量结果的最重要步骤。
了解SLAM 算法支持哪些纠错方法。它能否使用闭环扫描 和控制点?这些方法在采集环境中的效果如何?制造商如何说明使用这些方法可以达到的相对和绝对精度?
了解SLAM 算法在困难情况下的表现。它在狭长的走廊中能达到怎样的精度?或者在宽敞开阔的空间中?如何处理反射表面?或移动物体,如经过的人群?它是否能在各种环境中成功实现平移扫描?
对这些问题的回答将告诉您对移动映射器的数据质量有什么样的期望,并帮助您找到一款在日常工作中扫描的环境中可以信赖的工具。
总结
SLAM 算法使用传感器数据自动跟踪您的移动测绘仪在资产中行走的轨迹。制图软件则利用这些数据将您的点云在空间中正确对齐。
由于SLAM 算法的工作方式,移动扫描 技术本身容易出现某些误差,包括跟踪误差和漂移,从而降低最终点云的精度。
尽管如此,用户对最终交付成果的质量仍有很大的控制权。通过投资移动扫描 系统,在扫描过程中有效减少错误,然后执行必要的工作流程步骤来手动纠正错误,测绘专业人员就可以制作出企业可以依赖的高质量成果。
欲了解我们的NavVis M6 和 功能如何提高最终结果的质量,请下载我们的白皮书。 NavVis VLX在各种具有挑战性的环境中的精度测试数据,并了解我们的SLAM的闭环扫描 和控制点 功能对提高最终结果质量的作用,请在此处下载我们的白皮书。
肖恩·希金斯 (Sean Higgins) 是一位独立的技术作家、前贸易出版物编辑和户外运动爱好者。他认为,关于3D技术的清晰、无流行语的写作是一项公共服务。