

高档汽车制造商奥迪正在向全互联智能生产迈进,以互联高效的方式进行规划和生产。
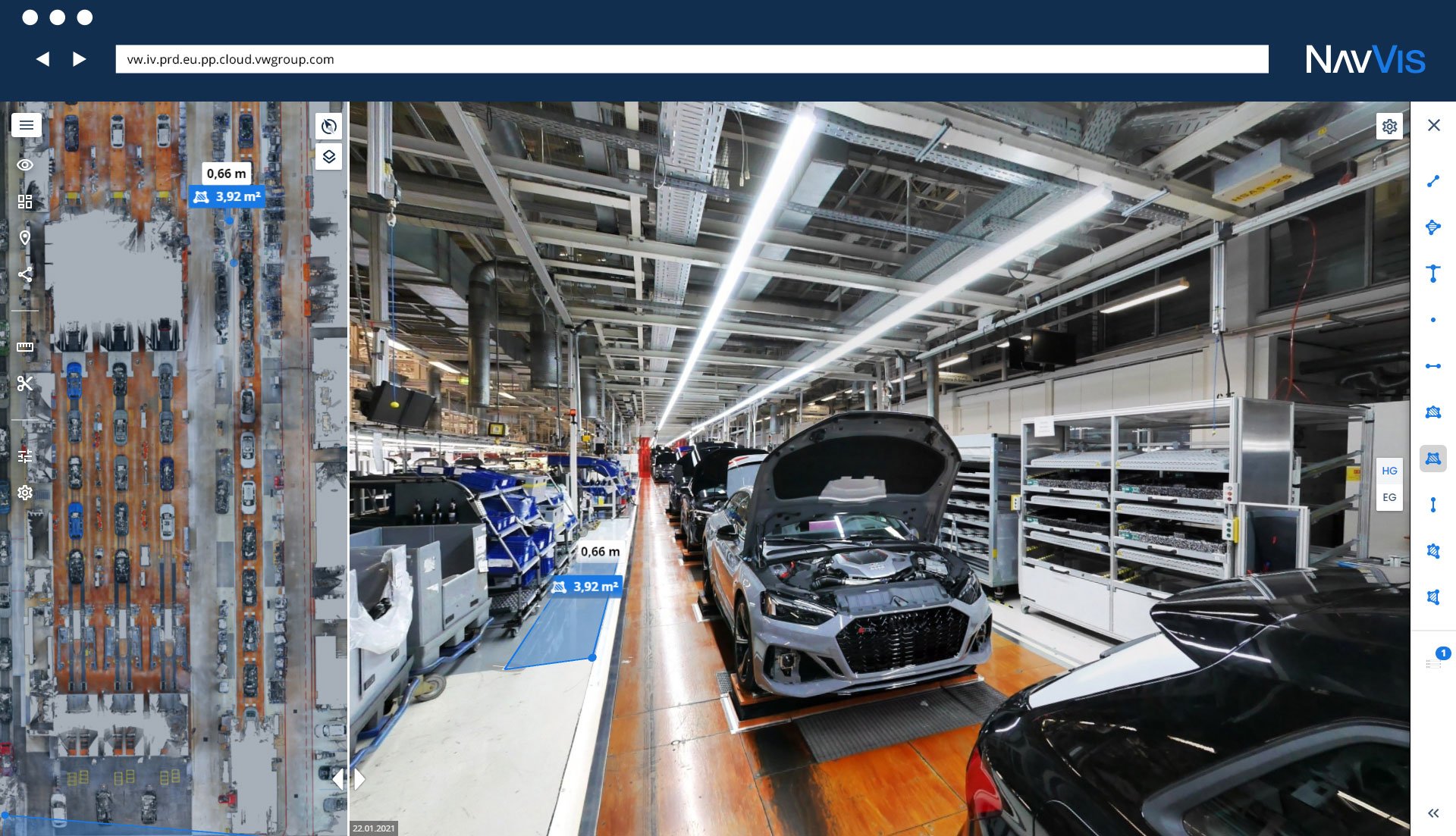
这场根本性革命的一个方面就是生产现场的全面数字化,而NavVis 数字工厂 解决方案则为生产现场的创新重新设计做出了重要贡献。移动式激光扫描仪、 NavVis VLX以前所未有的速度和质量,通过点云生成高分辨率三维模型,并捕捉全景图像。然后,在基于网络的平台NavVis IVION Enterprise 上,分布在世界各地的检测和规划团队可以基于相同的三维模型开展工作。对于许多任务而言,不再需要耗时的现场检测,从而简化了生产流程,提高了生产效率,并有望获得可持续的竞争优势。
从生产电动汽车(EV)中发掘新工艺
为什么需要数字化?因为将这些生产设施转换为生产电动汽车需要巨大的变革。
在通过NavVis 技术实现现场数字化之前,计划人员通常通过库存计划和现场检查来了解生产环境的现状,并制定新机型的生产计划。现在,他们基本上可以在电脑上完成这些工作。与经常过时的二维/三维计划相比,这样做所需的工作量要小得多,而且数据也更及时。
奥迪的厂区数字化始于 2017 年,自那时起,整个大众汽车集团利用NavVis 激光扫描技术,对大众汽车全球厂区总计 400 万平方米的空间进行了数字化采集,面积超过了纽约中央公园。
如今,大众汽车集团内越来越多的团队基于NavVis 数据开展工作,并发现了利用这些数字化设施进行虚拟规划的好处。2022 年,该网络将覆盖大众汽车集团的众多品牌,包括位于内卡苏尔姆、因戈尔施塔特捷尔、布鲁塞尔、圣何塞恰帕的奥迪,位于沃尔夫斯堡、埃姆登、汉诺威和恰塔努加的大众,以及位于姆拉达-博莱斯拉夫和卡瓦辛的斯柯达。而这仅仅是个开始:数字化区域最早将于明年扩大近一倍。

在奥迪,制造数字化项目经理 André Bongartz 和他的团队自 2018 年以来一直与NavVis 合作,将生产计划与现场存在分离开来。其结果是,整个生产设施和满是机器和机架的大厅都可以通过虚拟方式进行浏览,这为分布在世界各地的联合运营规划团队提供了工作基础。
全球团队在 NavVis IVION Enterprise(企业版)中在线合作
在工厂数字化的基础上,全球互联的团队可以实施全新的生产方法。例如,大众汽车集团的物流规划人员会设计和修改物流概念,以实施和提升生产电动汽车的新平台。
为此,他们从NavVis IVION 下载高精度的三维模型和数据,并将其上传到他们常用的CAD 软件中。例如,如果为了建立新的生产线而必须移动大厅中的墙壁或支柱,规划人员就可以在走动式三维模型中直观地看到这些变化。
例如,在规划工厂布局时,一个特别重要的方面就是车道:这是指生产线上的所有通道,叉车、自动导引车(AGV)和拖拉机-拖车组合(其中有些集装箱高达 2.5 米以上)在这些通道上行驶,以运送组装所需的部件。
利用捕捉到的三维数据,大众汽车公司的规划人员可以快速确定在没有碰撞风险的情况下可以运输的物体的最大高度。他们还能进一步规划和模拟 AGV 的路线。
每天可节省几小时的工作时间
为了在设计生产车间变更时考虑到所有重要方面,所有利益相关者都必须充分了解工厂布局。为此,在构思和安装阶段都要举办研讨会。
为了讨论生产线的布局,车间现场检查是这些车间不可或缺的一部分。输送机和机器人等部件的位置必须在事后进行确认或更新,而这一切都需要手工完成。这种手工准备工作有时需要数周时间。
如今,得益于NavVis IVION Enterprise 中的先进测量或高分辨率全景图像等功能,无需进行现场视察,每天可节省数小时的时间--工厂视察是在虚拟中进行的。在这一过程中,利用NavVis 技术创建的三维视图大有帮助,尤其是当点云与用于设计新布局的CAD 软件中的数据相结合时。通过这些新流程,沟通和决策变得更加容易。
奥迪公司在一个试点项目中测试了自主扫描。
大众汽车集团的子公司奥迪则更进一步。这家高档汽车制造商目前正在一个初步试点项目中测试利用NavVis 技术进行自主扫描。波士顿动力公司开发的机器狗 "Spot "是NavVis VLX 的载体平台。该机器狗自主穿行于生产设施中,并通过配备的NavVis VLX ,记录三维扫描和点云。

究竟为什么?"项目经理 André Bongartz 说:"我们正在测试是否有可能在生产环境中进行自主扫描。他补充说,到目前为止,结果非常令人满意。汽车集团希望自主扫描能为其带来另一个竞争优势:例如,项目组的目标是安装一个可以从周五晚上到周一早上全天候扫描的系统。"Bongartz 说:"狗不需要休息,因此我们可以节省大量的时间和财力。
奥迪还希望自主扫描解决方案能使三维数据和点云的跟踪变得更加容易。"Bongartz 说:"生产不断变化,因此我们希望定期扫描。他补充说,有了狗,这比以前更容易实现。不过,在有效使用该解决方案之前,还有一些问题需要回答,法律框架条件也需要明确。不过,Bongartz 确信 "自主扫描是未来的趋势"。
由联邦教育与研究部赞助
资金代码01IS20031A
项目说明:KMU-innovativ - Verbundprojekt KIMaps:以人工智能为驱动,为动态室内空间自主生成交互式高分辨率地图。