

NavVis 宣布推出新的测绘软件,可显著提高SLAM 技术在长走廊等室内环境中的精确度。
NavVis移动室内测绘、可视化和导航领域的全球领先公司--全球领先的移动室内测绘、可视化和导航公司--宣布推出新的测绘软件,可显著提高同步定位和测绘技术(SLAM )在室内环境(如长走廊)中的精确度。NavVis M3手推车 的用户可以使用该软件更新,它将显著提高所生成的地图和点云的精度。
NavVis 移动扫描 手推车 SLAM SLAM 解决了长期困扰机器人工程师的核心问题,使设备能够在确定其位置的同时绘制未知环境的地图。 是一种最初由机器人行业开发的技术,现在正越来越多地用于测量和自动驾驶技术。这是通过将数百万个测量值串联成一个轨迹估计来实现的。SLAM
然而,即使设备能够捕捉到高精度的单个测量值,将它们串联起来也会导致噪点 和微小测量不确定性的累积。随着时间的推移,估计的运动将开始偏离真实运动,这就是所谓的 "漂移 误差"。通常可以观察到,实际上是直线的长走廊会出现轻微弯曲。所有可用的SLAM 系统,无论使用的是激光雷达还是其他传感器,都会受到这种现象的固有影响。
创新的NavVis PrecisionSLAM 技术大大降低了漂移 的误差,提高了SLAM 的精度。在建筑物布局不允许采用环形封闭等辅助技术的情况下,这一点尤为明显。当使用SLAM 锚点将地面控制点纳入测绘过程时,精密SLAM 甚至可以提高精度。
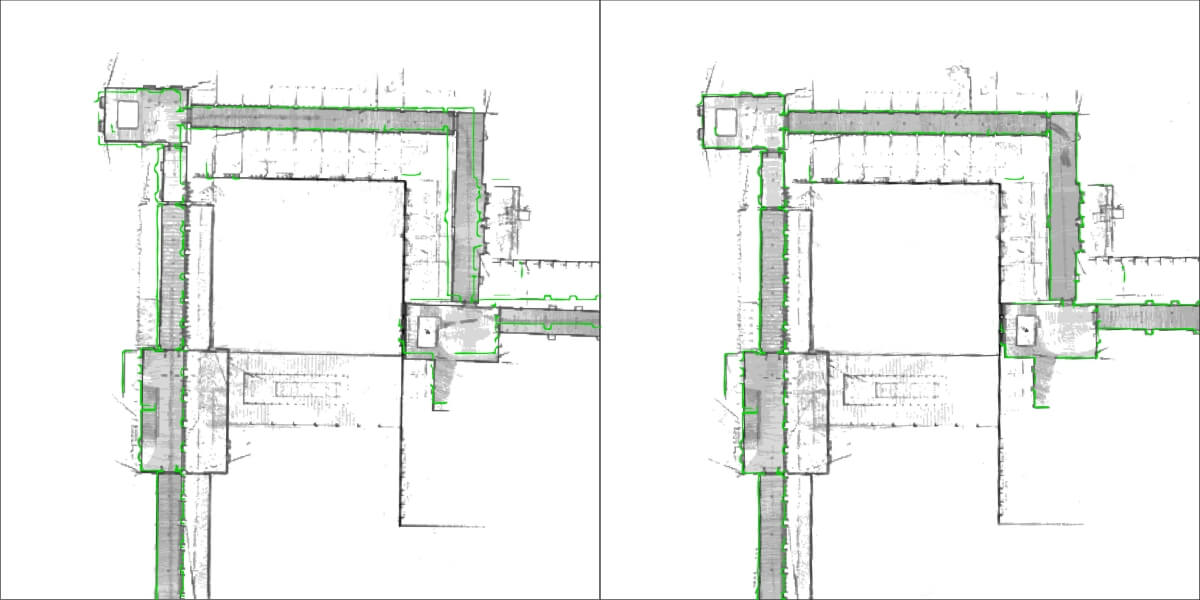
下面的图片展示了NavVis PrecisionSLAM 技术的影响。左图描绘的是用传统SLAM 系统绘制的一条长走廊,其中出现了上述漂移 错误。绿色轮廓显示了地图与真实结构的偏差。右图显示的是使用 M3手推车 和新的 PrecisionSLAM 技术对同一区域进行测绘时,地图精度明显提高。
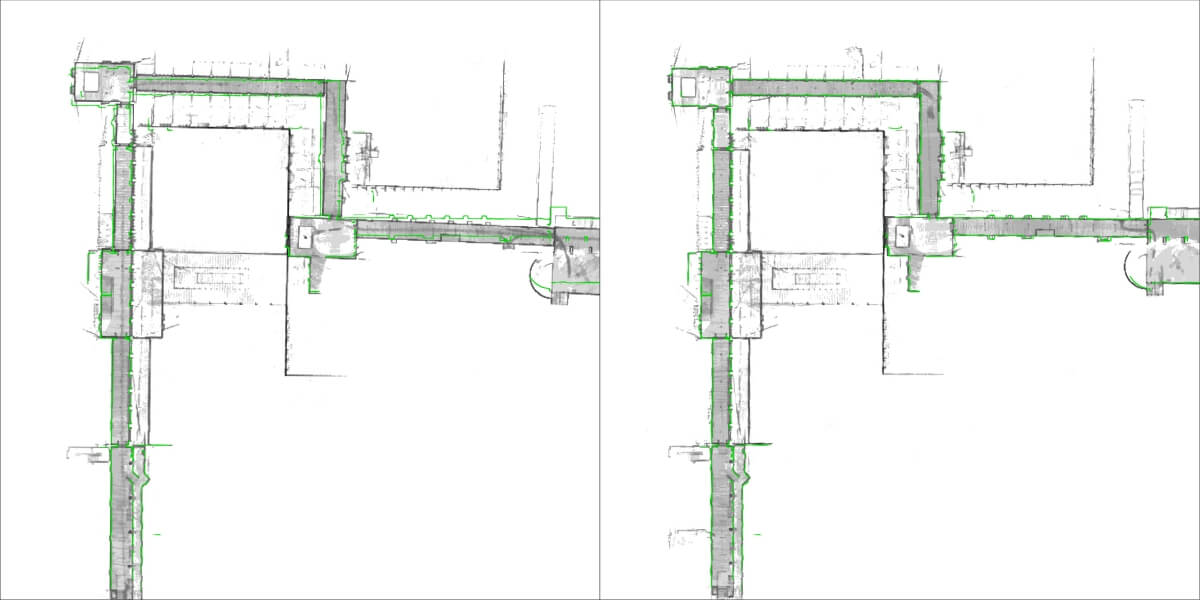
下面我们来仔细看看:
NavVis 扫描和视觉 的负责人 Stefan Romberg 博士说:
"我对我们新的精确SLAM 技术感到非常兴奋。我们一直在努力实现尽可能高的地图和点云精度,而提高SLAM 是取得成功的关键因素。众所周知,SLAM 开发人员和用户都知道,要实现高精度,需要采用环路闭合或地面控制点等辅助方法。然而,利用精确SLAM 技术,我们开发出了一种方法,它不仅能很好地补充前一种技术,而且在这些技术收效甚微或无法使用时尤为明显"。